Cross Entropy Method
A parallelized Python implementation.
This post introduces a parallelized implementation of the cross entropy method (CEM). CEM is often recommended as a first step before using a more complex method like reinforcement learning. The source code is available on github.
CEM optimizes parameters by:
- sampling parameters from a distribution
- evaluating parameters using total episode reward
- selecting the elite parameters
- refitting the sampling distribution using the elite parameters
- repeat
The sampling distribution is refit and sampled from using statistics (mean and standard deviation) from the elite population:
thetas = np.random.multivariate_normal(
mean=means,
cov=np.diag(np.array(stds**2) + extra_cov),
size=batch_size
)
The advantages of CEM are:
- simple
- gradient free
- stable across random seeds
- easily parallelizable
The disadvantages are:
- only learn from entire episode trajectories (not individual actions)
- struggles with long horizon problems
- open loop planning only - can be suboptimal in stochastic environments
Performance
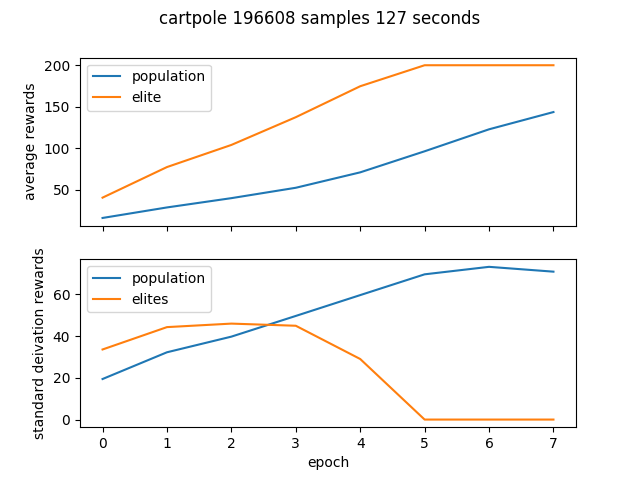
Results for the gym environments CartPole-v0 and Pendulum-v0. The standard deviation of the rewards shows how the elite population eventually becomes homogeneous.
Cartpole
$ python cem.py cartpole --num_process 6 --epochs 8 --batch_size 4096
Pendulum
$ python cem.py pendulum --num_process 6 --epochs 15 --batch_size 4096

Features of library
Parallelism over multiple process is achieved using Python’s multiprocessing library:
from multiprocessing import Pool
from functools import partial
# need partial to send a fixed parameter into evaluate_theta()
with Pool(num_process) as p:
rewards = p.map(partial(evaluate_theta, env_id=env_id), thetas)
Efficient sorting of parameters after evaluation in the environment is done using a binary heap:
import heapq
def get_elite_indicies(num_elite, rewards):
return heapq.nlargest(num_elite, range(len(rewards)), rewards.take)
The source code for this library is on github here.
import argparse
from collections import defaultdict
import heapq
from multiprocessing import Pool
from functools import partial
import os
import time
import gym
import numpy as np
from envs import setup_env
from policies import setup_policy
from plotting import plot_history
def ensure_dir(file_path):
directory = os.path.dirname(file_path)
if not os.path.exists(directory):
os.makedirs(directory)
def get_elite_indicies(num_elite, rewards):
return heapq.nlargest(num_elite, range(len(rewards)), rewards.take)
def evaluate_theta(theta, env_id, monitor=False):
env, _, _ = setup_env(env_id)
if monitor:
env = gym.wrappers.Monitor(env, env_id, force=False)
policy = setup_policy(env, theta)
done = False
observation = env.reset()
rewards = []
while not done:
action = policy.act(observation)
next_observation, reward, done, info = env.step(action)
rewards.append(reward)
observation = next_observation
return sum(rewards)
def run_cem(
env_id,
epochs=10,
batch_size=4096,
elite_frac=0.2,
extra_std=2.0,
extra_decay_time=10,
num_process=4
):
ensure_dir('./{}/'.format(env_id))
start = time.time()
num_episodes = epochs * num_process * batch_size
print('expt of {} total episodes'.format(num_episodes))
num_elite = int(batch_size * elite_frac)
history = defaultdict(list)
env, obs_shape, act_shape = setup_env(env_id)
theta_dim = (obs_shape + 1) * act_shape
means = np.random.uniform(size=theta_dim)
stds = np.ones(theta_dim)
for epoch in range(epochs):
extra_cov = max(1.0 - epoch / extra_decay_time, 0) * extra_std**2
thetas = np.random.multivariate_normal(
mean=means,
cov=np.diag(np.array(stds**2) + extra_cov),
size=batch_size
)
with Pool(num_process) as p:
rewards = p.map(partial(evaluate_theta, env_id=env_id), thetas)
rewards = np.array(rewards)
indicies = get_elite_indicies(num_elite, rewards)
elites = thetas[indicies]
means = elites.mean(axis=0)
stds = elites.std(axis=0)
history['epoch'].append(epoch)
history['avg_rew'].append(np.mean(rewards))
history['std_rew'].append(np.std(rewards))
history['avg_elites'].append(np.mean(rewards[indicies]))
history['std_elites'].append(np.std(rewards[indicies]))
print(
'epoch {} - {:2.1f} {:2.1f} pop - {:2.1f} {:2.1f} elites'.format(
epoch,
history['avg_rew'][-1],
history['std_rew'][-1],
history['avg_elites'][-1],
history['std_elites'][-1]
)
)
end = time.time()
expt_time = end - start
print('expt took {:2.1f} seconds'.format(expt_time))
plot_history(history, env_id, num_episodes, expt_time)
num_optimal = 3
print('epochs done - evaluating {} best thetas'.format(num_optimal))
best_theta_rewards = [evaluate_theta(theta, env_id, monitor=True)
for theta in elites[:num_optimal]]
print('best rewards - {} acoss {} samples'.format(best_theta_rewards, num_optimal))
Thanks for reading!